







Os sistemas de controle de nível são um dos mais utilizados nas industrias, laboratórios, ambiente acadêmico etc. De modo a internalizar conceitos relativos a física, controle de processos, projeto de microcontroladores, eletrônica etc, este tipo de sistema é inter e multidisciplinar. Pois, além de necessitar de conhecimentos físicos dos processos, os profissionais da área de automação e controle precisará de conhecimentos na área de eletrônica e programação e terá de saber como linkar tais conceitos.
Nesta postagem, utilizando o software Simulink-Matlab, irei elaborar uma modelagem de um sistema de controle de nível simples e projetar um controlador PID para este sistema.
Primeiramente, iremos fazer a modelagem matemática do sistema de nível.

Percebemos então que o sistema é composto de um reservatório de água (Tanque) e uma bomba.
O reservatório tem uma entrada (através da bomba) e uma saída (através de um orifício no fundo do tanque). Note que, podemos controlar o nível do tanque, e consequentemente, a vazão de saída através da vazão de entrada que será fornecida pela bomba dágua.
Então teremos:
- Vazão de Entrada - Variável manipulada
- Nível do tanque - Variável controlada
Abaixo, temos uma forma mais simples para chegarmos até a equação diferencial que representará este sistema:

Onde:
qi1 - Vazão de entrada
q1 - Vazão de saída
R1 - Resistência à vazão de entrada (Onde a bomba atuará)
R2 - Resistência à vazao de saída
A1 - Área do tanque - Como a área não varia de acordo a altura, A1 será a capacitância
h1 - Nível do tanque
Resistência será a relação entre Variação na diferença de nível sobre a variação do fluxo de líquido. A resistência nos dará a relação de quanto de líquido que teremos que acumular para que a vazão de saída aumente em uma unidade.
Capacitância nos dará a relação de quanto o tanque é capaz de armazenar.
A equação ficará da seguinte maneira:
A1.h1'(t) = (dH - h1)/R1 - h1/R2
Ou seja, a variação do nível do recipiente será dado pela vazão de entrada menos a vazão de saída.
Perceba que o primeiro termo da equação é qi1 e o segundo é q1.
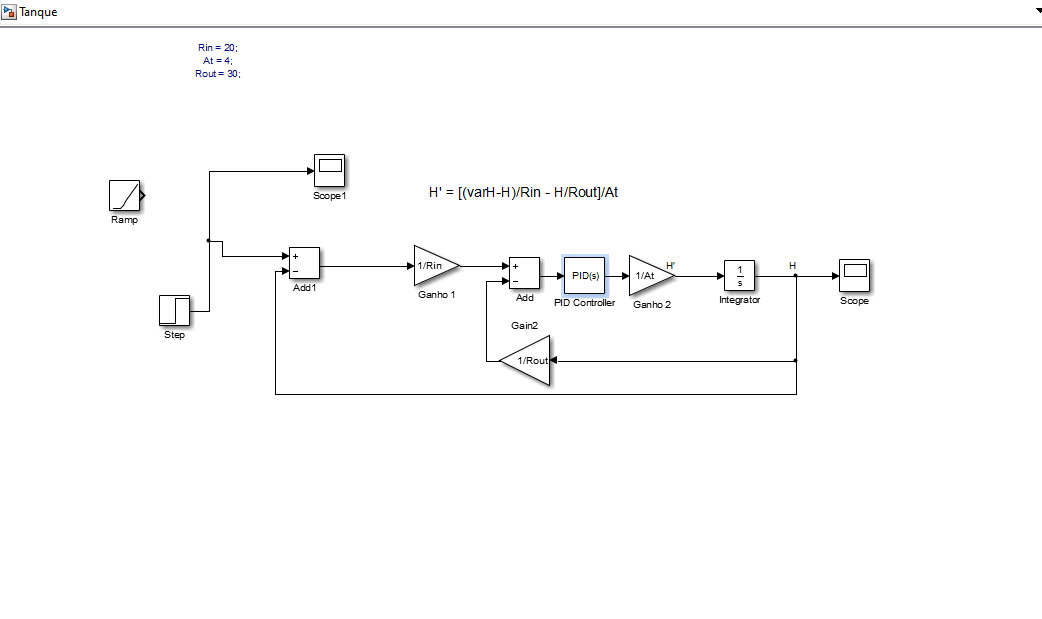
Modelando no simulink teremos:

Perceba que temos 1 integrador no sistema, devido a este ser caracterizado como sistema de primeira ordem.
Agora aplicarei algumas entradas através do bloco step, apenas modificando a amplitude para observamos como se comporta a saída (scope). Não podemos esquecer de atribuir valores para as variáveis Rin, Rout e At.
Ao aplicarmos uma entrada em degrau com amplitude 1, temos este resultado:

Percebemos então que a saída não consegue acompanhar a entrada.
Apliquemos agora um degrau com amplitude 8.

Perceba que ele se estabiliza, porém não no valor desejado que seria 8.
Notamos que o sistema necessita de um controlador.
Introduzirmos o controlador PID no sistema:
E agora vamos sintonizá-lo com sistema de nível:

Agora, nós poderemos utilizar os parâmetros do controlador PID para satisfazer nossa necessidade. Um controlador P.I.D. é constituído de:
P - Proporcional: Quanto maior for a diferença entre o Setpoint e o que o sistema estará retornando, maior será a resposta para a correção deste erro, ou seja é uma resposta proporcional.
I - Integral: Existem erros que permanecem no estado estacionário de sistemas, estes são chamados de erros estáticos. A parcela integral do controlador serve para sanar tal problema, eliminando assim o erro no estado estacionário.
D - Derivativo: Esta parcela consegue prever o comportamento da resposta do controlador, fazendo com que ele tome ações prevendo o que irá acontecer posteriormente, esta parcela trabalha com a derivada, ou seja, saberemos qual será o coeficiente angular da reta tangente à todos pontos da curva de resposta ao erro e assim, poderemos predizer comportamentos.
Nota: É importante salientar que as parcelas I e D, puramente não conseguem realizar o controle de um sistema, sendo assim, sempre necessária a parcela P.
Após pressionarmos o botão tune, aparecerá esta tela interativa, você poderá escolher o tempo de resposta para o sistema. Note que, sempre que ganhamos em uma característica perderemos em outra, portanto é de suma importância sabermos qual as necessidades reais do sistema, para projetarmos corretamente o controlador.

Após tudo configurado, a resposta do sistema será a seguinte:

O sistema responde satisfatoriamente.