







Ex.: Site de venda imóveis,
segunda-feira, 10 de agosto de 2015
Programação em PHP
Brevemente farei uma postagem de como desenvolver um website e uma webapp utilizando a linguagem PHP e utilizando o Framework Yii.
terça-feira, 1 de outubro de 2013
Projeto de Controlador para um Sistema de Nível
Os sistemas de controle de nível são um dos mais utilizados nas industrias, laboratórios, ambiente acadêmico etc. De modo a internalizar conceitos relativos a física, controle de processos, projeto de microcontroladores, eletrônica etc, este tipo de sistema é inter e multidisciplinar. Pois, além de necessitar de conhecimentos físicos dos processos, os profissionais da área de automação e controle precisará de conhecimentos na área de eletrônica e programação e terá de saber como linkar tais conceitos.
Nesta postagem, utilizando o software Simulink-Matlab, irei elaborar uma modelagem de um sistema de controle de nível simples e projetar um controlador PID para este sistema.
Primeiramente, iremos fazer a modelagem matemática do sistema de nível.

Percebemos então que o sistema é composto de um reservatório de água (Tanque) e uma bomba.
O reservatório tem uma entrada (através da bomba) e uma saída (através de um orifício no fundo do tanque). Note que, podemos controlar o nível do tanque, e consequentemente, a vazão de saída através da vazão de entrada que será fornecida pela bomba dágua.
Então teremos:
- Vazão de Entrada - Variável manipulada
- Nível do tanque - Variável controlada
Abaixo, temos uma forma mais simples para chegarmos até a equação diferencial que representará este sistema:

Onde:
qi1 - Vazão de entrada
q1 - Vazão de saída
R1 - Resistência à vazão de entrada (Onde a bomba atuará)
R2 - Resistência à vazao de saída
A1 - Área do tanque - Como a área não varia de acordo a altura, A1 será a capacitância
h1 - Nível do tanque
Resistência será a relação entre Variação na diferença de nível sobre a variação do fluxo de líquido. A resistência nos dará a relação de quanto de líquido que teremos que acumular para que a vazão de saída aumente em uma unidade.
Capacitância nos dará a relação de quanto o tanque é capaz de armazenar.
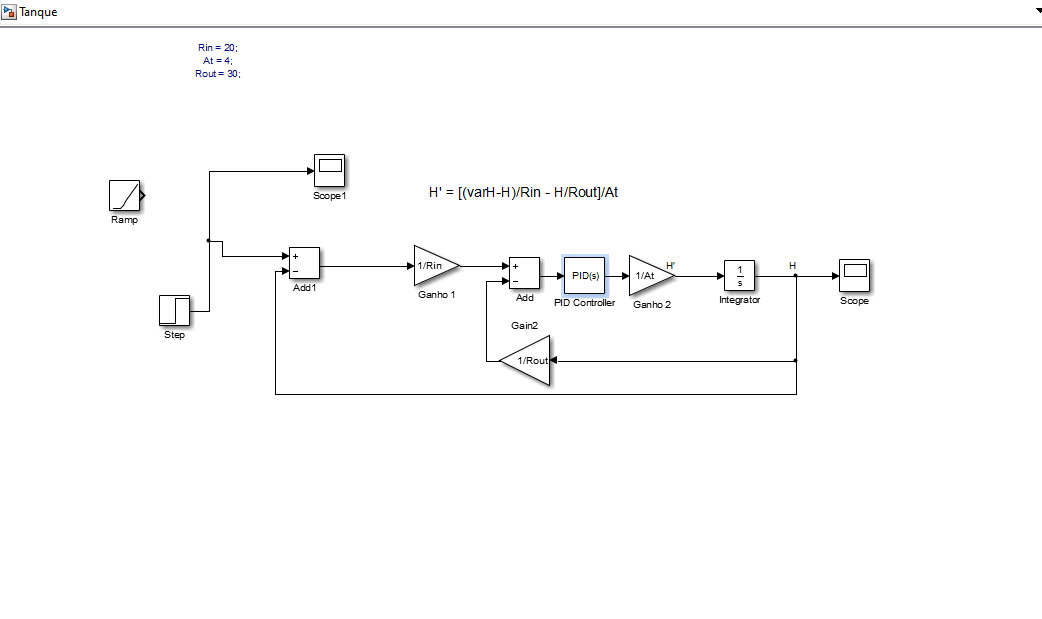
A equação ficará da seguinte maneira:
A1.h1'(t) = (dH - h1)/R1 - h1/R2
Ou seja, a variação do nível do recipiente será dado pela vazão de entrada menos a vazão de saída.
Perceba que o primeiro termo da equação é qi1 e o segundo é q1.
Modelando no simulink teremos:

Perceba que temos 1 integrador no sistema, devido a este ser caracterizado como sistema de primeira ordem.
Agora aplicarei algumas entradas através do bloco step, apenas modificando a amplitude para observamos como se comporta a saída (scope). Não podemos esquecer de atribuir valores para as variáveis Rin, Rout e At.
Ao aplicarmos uma entrada em degrau com amplitude 1, temos este resultado:

Percebemos então que a saída não consegue acompanhar a entrada.
Apliquemos agora um degrau com amplitude 8.

Perceba que ele se estabiliza, porém não no valor desejado que seria 8.
Notamos que o sistema necessita de um controlador.
Introduzirmos o controlador PID no sistema:
E agora vamos sintonizá-lo com sistema de nível:

Agora, nós poderemos utilizar os parâmetros do controlador PID para satisfazer nossa necessidade. Um controlador P.I.D. é constituído de:
P - Proporcional: Quanto maior for a diferença entre o Setpoint e o que o sistema estará retornando, maior será a resposta para a correção deste erro, ou seja é uma resposta proporcional.
I - Integral: Existem erros que permanecem no estado estacionário de sistemas, estes são chamados de erros estáticos. A parcela integral do controlador serve para sanar tal problema, eliminando assim o erro no estado estacionário.
D - Derivativo: Esta parcela consegue prever o comportamento da resposta do controlador, fazendo com que ele tome ações prevendo o que irá acontecer posteriormente, esta parcela trabalha com a derivada, ou seja, saberemos qual será o coeficiente angular da reta tangente à todos pontos da curva de resposta ao erro e assim, poderemos predizer comportamentos.
Nota: É importante salientar que as parcelas I e D, puramente não conseguem realizar o controle de um sistema, sendo assim, sempre necessária a parcela P.
Após pressionarmos o botão tune, aparecerá esta tela interativa, você poderá escolher o tempo de resposta para o sistema. Note que, sempre que ganhamos em uma característica perderemos em outra, portanto é de suma importância sabermos qual as necessidades reais do sistema, para projetarmos corretamente o controlador.

Após tudo configurado, a resposta do sistema será a seguinte:

O sistema responde satisfatoriamente.
sexta-feira, 6 de setembro de 2013
Python + Simulino (Simulador do Arduino) no ISIS Proteus
Olá, hoje nós iremos fazer uma comunicação entre o IDLE do Python 2.7.
Para comunicarmos com a porta serial através do Python, é preciso baixar a biblioteca serial.py, segue o link:
https://pypi.python.org/pypi/pyserial
Descompacte na pasta do python, localize a pasta através do prompt de comando e digite:
python setup.py install
Para testar se foi instalado corretamente basta abrirmos a o python no prompt do DOS, digitando python e depois import serial. (Veja abaixo)

Segue abaixo o circuito feito no proteus:

O Simulino do Arduino Uno você encontrará em: http://blogembarcado.blogspot.com.br
Temos que fazer algumas configurações no componente COMPIM, utilizar largura de banda:9600 e a porta COM1 (estou usando a COM 1 aqui para o Simulino e COM 2 para o objeto Serial do Python)
Para fazer esta ligação entre Python e Simulino, precisamos de um software que gere portas COM virtuais.
Utilizaremos o Virtual Serial Port Emulator (link: http://www.baixaki.com.br/download/free-virtual-serial-ports-emulator.htm)
Após instalá-lo, geramos as portas virtuais:

Escolha 'pair' para fazer com que tudo que aconteça numa porta ocorra na outra, aqui estou a utilizar COM1 e COM2.
Vídeo:
Código feito para o Arduino:
int led_biby = 13;
int led_blue = 12;
int led_yellow = 11;
int led_red = 10;
char var;
void setup(){
pinMode(led_biby, OUTPUT);
pinMode(led_blue, OUTPUT);
pinMode(led_yellow, OUTPUT);
pinMode(led_red, OUTPUT);
Serial.begin(9600);
}
void loop(){
digitalWrite(led_biby, LOW);
digitalWrite(led_blue, LOW);
digitalWrite(led_yellow, LOW);
digitalWrite(led_red, LOW);
if(Serial.available()>0){
var = Serial.read();
switch (var){
case 'a':
digitalWrite(led_biby, HIGH);
Serial.print("Led Biby is on");
delay(300);
break;
case 'b':
digitalWrite(led_blue, HIGH);
Serial.print("Led Blue is on");
delay(300);
break;
case 'y':
digitalWrite(led_yellow, HIGH);
Serial.print("Led Yellow is on");
delay(300);
break;
case 'r':
digitalWrite(led_red, HIGH);
Serial.print("Led Red is on");
delay(300);
break;
default:
break;
}
}
}
#importa a biblioteca serial encontrada no endereço: https://pypi.python.org/pypi/pyserial
import serial
#cria-se um objeto com o nome arduino que se comunicará com o proteus
arduino_uno = serial.Serial()
#define qual porta COM arduino será conectado (Estou utilizando windows)
arduino_uno.port = 1
#define qual o timeout para comunicação entre o idle do python e o simulino
arduino_uno.timeout = 2
#começa a comunicação
arduino_uno.open()
ligar_led='e'
#loop para comunicação
while(ligar_led!='s'):
ligar_led = raw_input('Informe qual led queres ligar (a, b, y ou r) para sair informe s: ')
arduino_uno.write(ligar_led)
print(arduino_uno.readall()+'\n\n')
#fecha comunicaçao
arduino_uno.close()
segunda-feira, 15 de julho de 2013
Modelagem de Churrasqueira - Sketchup
SketchUp é um software proprietário para a criação de modelos em 3D no computador. Foi originalmente desenvolvido pela At Last Software(@last software), uma empresa estadunidense com sede em Boulder, Colorado, a qual foi adquirida pela Google, como anunciado a 14 de Março de 2006. Em 2012 Trimble Navigation adquiriu o programa. O SketchUp está disponível em duas versões: a versão profissional, Pro, e a versão gratuita, Make, (para uso privado, não comercial). No site em inglês do SketchUp, você encontra para download a versão 2013 em inglês do software.
(Wikipédia)
O Sketchup é um software de fácil manuseio para se fazer modelagens 3D dos mais diversos tipos.
Muito útil quando se tem que fazer apresentações
Utilizando deste software fiz a modelagem de uma churrasqueira, seguem as imagens:



(Wikipédia)
O Sketchup é um software de fácil manuseio para se fazer modelagens 3D dos mais diversos tipos.
Muito útil quando se tem que fazer apresentações
Utilizando deste software fiz a modelagem de uma churrasqueira, seguem as imagens:



Gastando pouco tempo (Menos de 30 mins), modelei esta churrasqueira.
sexta-feira, 12 de julho de 2013
Programa de geração de quadrados mágicos com função recursiva
Anteriormente postei um programa feito em C, em que gerava quadrados mágicos de ordem [3x3].
Utilizando a linguagem de programação Python, através de uma função recursiva para geração de todas as combinações possíveis de números, consegui fazer um programa onde é possível a geração de quaisquer quadrado mágico. Porém, requer mais tempo. Segue o código

Utilizando a linguagem de programação Python, através de uma função recursiva para geração de todas as combinações possíveis de números, consegui fazer um programa onde é possível a geração de quaisquer quadrado mágico. Porém, requer mais tempo. Segue o código
from math import sqrt
"""Esta função verifica se todos os termos do vetor são únicos"""
def unico(vet):
cont=0
uni=True
for each_term in vet:
for this_term in vet:
if each_term==this_term:
cont+=1
if(cont>1):
uni=False
cont=0
return uni
"""Esta é a função para comparar linhas, colunas e diagonais do quadrado mágico
Ela exige a passagem de um vetor como parâmetro. Obs.: 'Esta função somente funciona com vetores os quais sua ordem tenham raizes quadradas exatas"""
def compare(vet):
ordem=int(sqrt(len(vet)))
somas=[]
somas2=[]
somas3=[0]
somas4=[0]
magicSquare=False
acm=0
i=0
for each_term in vet:
acm+=each_term
if ((vet.index(each_term)+1)%ordem==0):
somas.append(acm)
acm=0
acm=0
for each_index in range(0,ordem):
somas2.append(0)
for each_term in vet:
somas2[i]+=each_term
i+=1
if i==ordem:
i=0
for inx in range(0,ordem):
somas3[0]+=vet[inx*(ordem+1)]
somas4[0]+=vet[(len(vet)-1)-(1+inx)*(ordem-1)]
somas=set(somas)
somas2=set(somas2)
somas3=set(somas3)
somas4=set(somas4)
if (somas==somas2==somas3==somas4):
magicSquare=True
return magicSquare
"""Esta função gera todas as combinações possíveis de acordo a ordem passada do vetor
Exemplo merge(vet, len(vet), len(vet)-1)"""
def merge (vet, tam, it):
quad=[]
if it>0:
for each_term in vet:
merge(vet, tam, it-1)
vet[it]+=1
vet[it]=1
else:
for each_term in vet:
if(unico(vet)):
if compare(vet):
quad.append(vet)
print(vet)
vet[it]+=1
vet[it]=1
return quad
vet=[1 for each_term in range(1,10)]
print(merge(vet, len(vet), len(vet)-1))

ShotScreen do programa em funcionamento
segunda-feira, 20 de maio de 2013
Programa de Controle - Sumô de Robô | Medusa Software
Segue explicações e regras para a confecção de um robô de sumô
http://www.area1.edu.br/_media/textos/2832013164658.pdfPara a construção da parte física do Robô Medusa utilizamos placas de zinco, a estrutura física foi concebida por meu colega Leandro Leal.
* Motores de vidro elétrico da Bosch.
* Baterias de lítio de 12V, 2200mAH.
* Placa microcontroladora Arduino Uno, baseada no Microcontrolador ATmega328
http://arduino.cc/en/Main/arduinoBoardUno
* Sensores Infravermelhos (Utilizados para 'enxergar' a borda)
* Sensor Ultrassônico para enxergar o oponente.
Segue o programa de controle do robô.
Note que, quando o programa está em funcionamento, só utilizamos a função delay() quando ele encontra a borda. Isto é feito como medida de sobrevivência.
Porém, não é recomendável utilizar a função de delay() quando necessitamos que um equipamento realize diversas tarefas simultaneamente. Desta forma, utilizamos um conceito conhecido como Multitarefa (Multithread) para que fosse possível que 'ao mesmo tempo' o robô procurasse o oponente e verificasse se teria encontrado a borda.
/*Este programa foi elaborado para controlar um robô de sumô*/
#define borda 2 //definimos que no pino 2 será conectado o sensor de borda
#define trigger 13 //definimos que o pino 13 funcionará como trigger do sensor ultrasônico
#define echo 7 //definimos o pino 7 como echo do sensor ultrasônico
#define motorDir01 6 //definimos que a porta 5 será o bit 1 da ponte H do motor direito (0x)
#define motorDir02 5 //definimos que a porta 6 será o bit 2 da ponte H do motor direito (x0)
#define motorEsq01 4 //definimos que a porta 3 será o bit 1 da ponte H do motor esquerdo(0x)
#define motorEsq02 3 //definimos que a porta 4 será o bit 1 da ponte H do motor esquerdo(x0)
//a ponte H funciona da seguinte maneira: (motorDir01,motorDir02,motorEsq01,motorEsq02)
// (0,1,0,1) Anda pra frente
// (1,0,1,0) Anda pra trás
// (0,0,0,0) Parado
// (1,1,1,1) Parado, condição não recomendada
/*********************Estrutura utilizada para realizar multitarefa ***************************/
typedef struct Timer
{
unsigned long start;//Armazena o tempo de quando foi iniciado o timer
unsigned long timeout;//Tempo após o start para o estouro
};
unsigned long Now ( void )
{
return millis ( );//Retorna os milisegundos depois do reset
}
boolean TimerEstorou (struct Timer * timer)
{
//Verifica se o timer estourou
if ( Now () > timer->start + timer->timeout) {
return true;
}
return false;
}
//após o tempo estourar temos que iniciar o timer com o tempo atual
void timerStart(struct Timer * timer){
timer->start = Now();
}
void timerDesloc(struct Timer * timer, unsigned long tempo){
timer->start = Now()+tempo;
}
Timer timerBorda = {0, 10}; //Verifica se achou a borda a cada 10 milisegundos
Timer timerAchou = {0, 100}; //verifica se achou o oponente a cada 100 milisegundos
Timer timerFrente = {0, 800}; //tempo que o robô passa indo pra frente
Timer timerGira = {0, 3243}; //tempo que o robô passa girando
Timer timerfinal = {0, 85000};// tempo de 1:30 minutos, final do round
boolean sentidoGiro=true; //variável criada para o robô girar hora pra direita, hora pra esquerda
/********** Função preparatória ****************/
void setup(){
// pinos definidos como saída
pinMode(motorDir01, OUTPUT);
pinMode(motorDir02, OUTPUT);
pinMode(motorEsq01, OUTPUT);
pinMode(motorEsq02, OUTPUT);
pinMode(trigger, OUTPUT);
// pinos definidos como entrada
pinMode(borda, INPUT);
pinMode(echo, INPUT);
//chama a função parado e espera 3 segundos antes de começar a luta.
parado();
delay(5000); //espera de 5 segundos antes do início da partida. Este parâmetro foi alterado para 3000 pois //quando testamos com o delay(5000) o robô ficava 7 segundos parado.
timerFrente.start= Now() - timerFrente.timeout; // atrasamos o Start do tempo de ir pra frente de modo ao robô começar a luta indo pra frente.
timerGira.start= Now();
timerAchou.start= Now();
}
int i=0;
void loop(){
if(TimerEstorou(&timerfinal)){
while(1)
parado();// função a ser chamada no final de cada round. Se o robô continuar andando isso caracteriza punição
}
if(i=0)
{
timerStart(&timerBorda);
timerStart(&timerGira);
timerStart(&timerAchou);
i+=1;
}
if(TimerEstorou(& timerFrente)){
andaFrente();
timerStart(& timerFrente);
//timerStart(& timerGira);
}
if(TimerEstorou(& timerBorda)){
if(!digitalRead(borda)){// verifica se achou a borda -- ver pino nomeado como borda
andaTras();
delay(1000);//delay de sobrevivência
timerStart(& timerFrente);//colocar o timer frente no início de seu ciclo
timerDesloc(& timerGira, -timerGira.timeout);// faz com que o robô gire
timerStart(& timerAchou);
}
timerStart(& timerBorda);
}
//dentro da função achou tem um delay,porém é na casa dos Microssegundos e isso o torna desprezível
if(TimerEstorou(& timerAchou)){
if(achou()){
andaFrente();
timerStart(& timerGira);
}
timerStart(& timerAchou);
}
if(TimerEstorou(& timerGira)){
if(sentidoGiro){
giraDireita();
sentidoGiro=!sentidoGiro;
}
else
{
giraEsquerda();
sentidoGiro=!sentidoGiro;
}
timerStart(& timerGira);
}
}
/********** Funções de movimento ****************/
void andaFrente(){
digitalWrite(motorDir01, HIGH);
digitalWrite(motorDir02, LOW);
digitalWrite(motorEsq01, HIGH);
digitalWrite(motorEsq02, LOW);
}
void andaTras(){
digitalWrite(motorDir01, LOW);
digitalWrite(motorDir02, HIGH);
digitalWrite(motorEsq01, LOW);
digitalWrite(motorEsq02, HIGH);
}
void parado(){
digitalWrite(motorDir01, LOW);
digitalWrite(motorDir02, LOW);
digitalWrite(motorEsq01, LOW);
digitalWrite(motorEsq02, LOW);
}
void giraDireita(){
digitalWrite(motorDir01, HIGH);
digitalWrite(motorDir02, LOW);
digitalWrite(motorEsq01, LOW);
digitalWrite(motorEsq02, HIGH);
}
void giraEsquerda(){
digitalWrite(motorDir01, LOW);
digitalWrite(motorDir02, HIGH);
digitalWrite(motorEsq01, HIGH);
digitalWrite(motorEsq02, LOW);
}
/********** Função de busca ****************/
float distancia() {
float tempo, dist;
digitalWrite(trigger, LOW);
delayMicroseconds(2);
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
tempo = pulseIn(echo, HIGH);
dist = (((tempo/2) * 350)/1000000);
dist *= 100;
return dist;
}
boolean achou(){
/*if(giro)
giraHorario();
else
giraAnti();*/
if (distancia()<55)
return true;
else
return false;
}


quinta-feira, 16 de maio de 2013
Autocad - Perspectiva Isométrica

No AutoCAD temos um recurso que facilita o desenho em perspectiva isométrica.
Segue vídeo explicando como utilizar tal recurso.
http://www.youtube.com/watch?v=ODXyYdokdfE
Assinar:
Comentários (Atom)